Projects
|
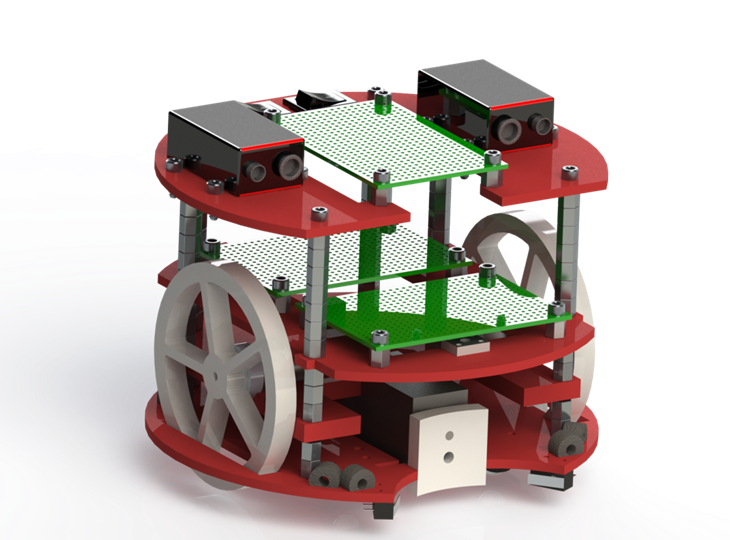
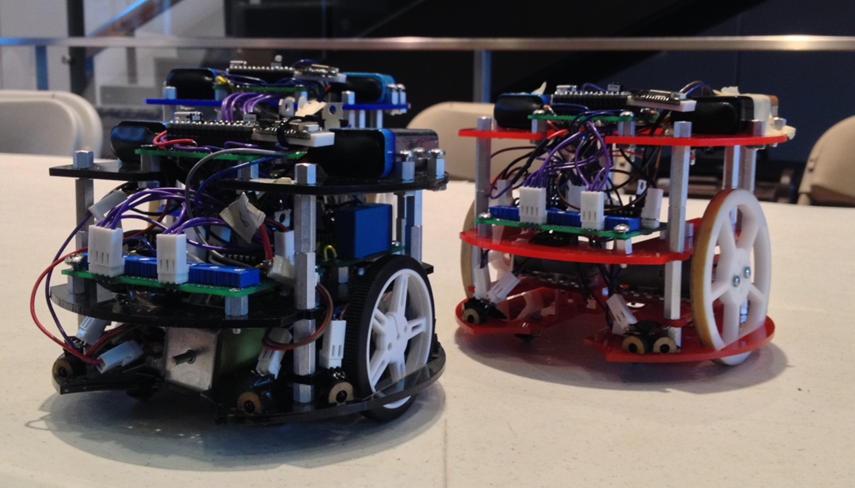
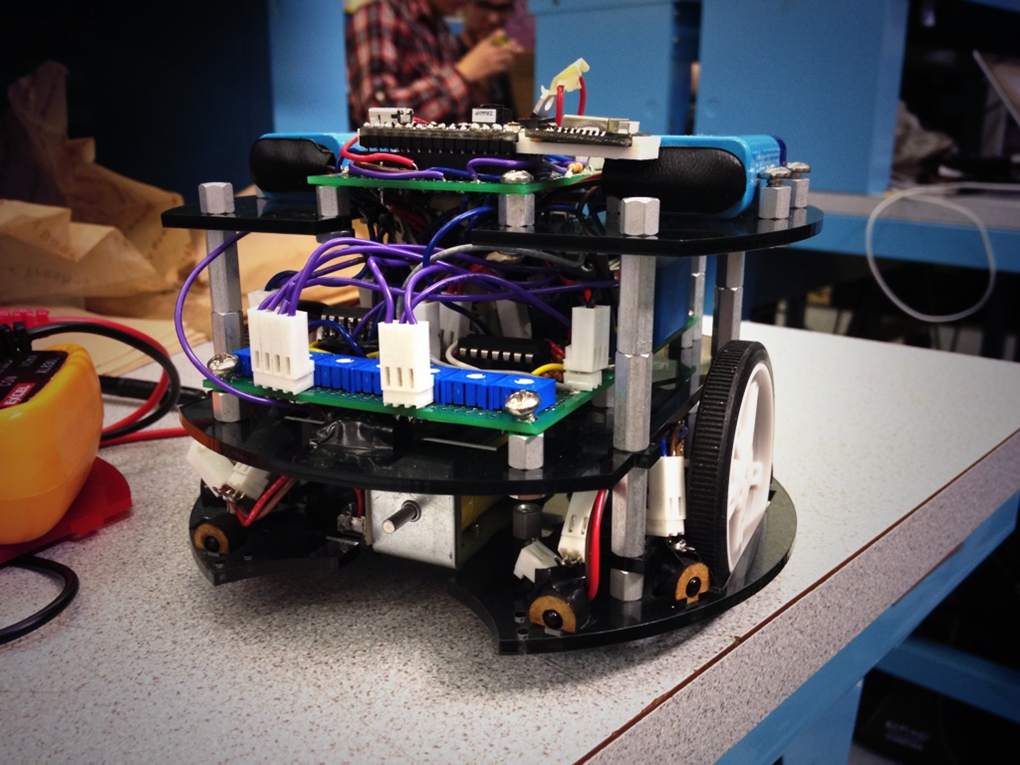
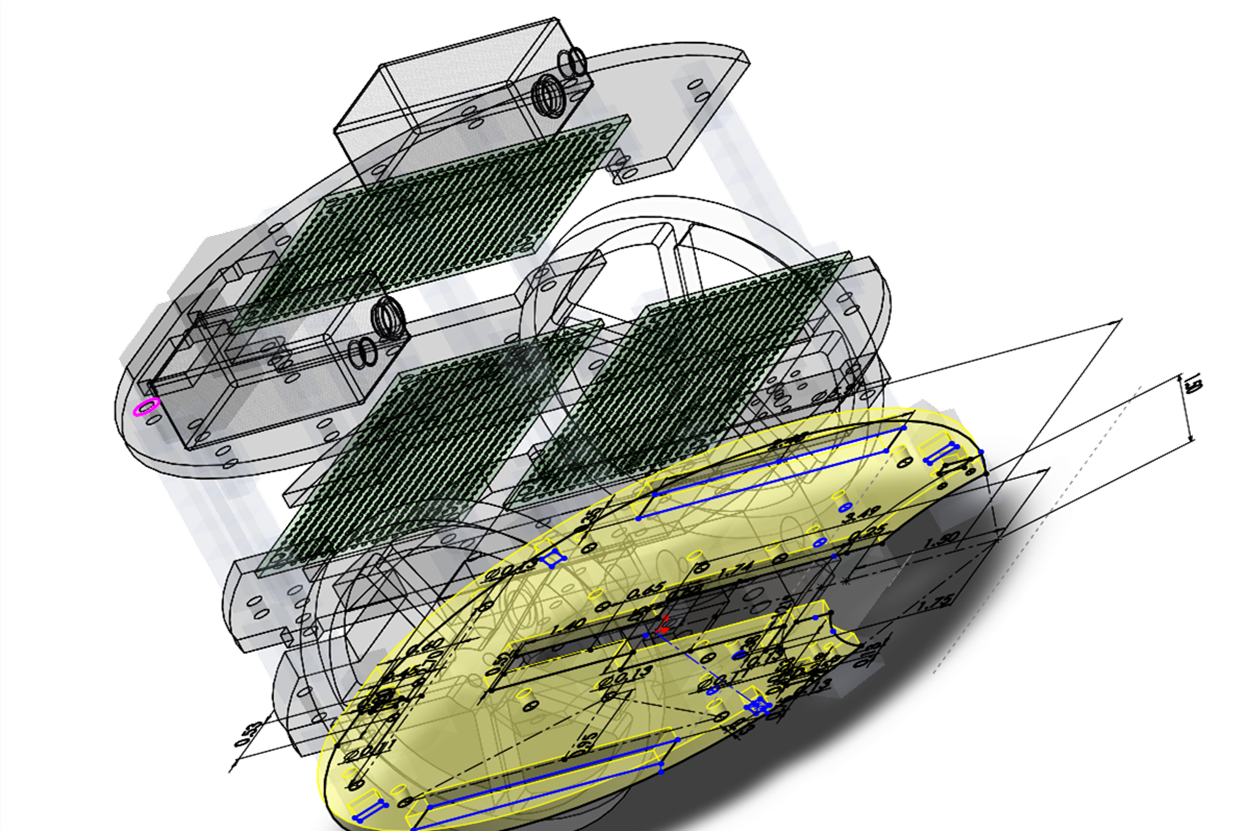
RobockeyCompleted: 2013-12-12 Collaborators: Klyde Breitton and Nick LaBarbera This is Robockey, the final project for MEAM 510 (Design of Mechatronic Systems). In summary, Robockey is a 3v3 autonomous robot hockey tournament. In 2013, there were close to 30 teams competing in the tournament. You can read about the rules of Robockey here. Each of our robots was powered by two 600mAh 9V batteries - one for motor power, and one for logic. The robots are controlled by the M2 microcontroller, and localization is accomplished with the help of the mWii sensor. All of the manufacturing, electronics, and code was completely original work by our team. 7 IR phototransistors spaced around the bottom of the bots served to detect a custom IR-LED puck. The bots turn at different degrees/speeds depending on which phototransistor has the highest value; it moves slower and turns tighter when the phototransistors near the back are at a maximum, and moves faster/turns very slightly when the ones near the front are at a maximum. PID control is implemented to ensure smooth movement. Below is a test video of this algorithm. Below are clips from preliminary matches, where our team went undefeated 5-0. |